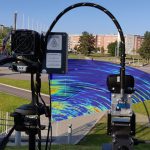
Automated robots on a factory floor need many on-board sensors to capture the environment in real-time for safe navigation. In contrast to onboard sensing, infrastructure-based sensing and fusion of data from multiple sensors can generate high resolution real-time 3D maps of the operating environment with enhanced field-of-view. This can be used to provide required guidance-control, for the moving robots to traverse through the environment avoiding obstacles and collisions while reducing the burden of heavy on-board processing.
Contact:
Nandana Rajatheva, [email protected]
Reference:
M. Padmal, D. Marasinghe, V. Isuru, N. Jayaweera, S. Ali, N. Rajatheva, “Elevated LiDAR based Sensing for 6G — 3D Maps with cm Level Accuracy,” available [online]: https://arxiv.org/abs/2102.10849